ергономски приступ
Уредио др Гиованни Цхетта
Стопало, у улози „антигравитационе базе“, прво ступа у контакт са потпорном површином, прилагођавајући јој се ослобађајући је, затим се укрућује, постајући полуга за „одбацивање“ саме површине. Стога стопало мора наизменично мењати услов опуштености са стањем укочености.Наизменичност лабавости и крутости оправдава аналогију са пропелером променљивог корака. Задња и предња нога су поређане у равни које се укрштају на променљив начин. У идеалном стању, задње стопало је постављено вертикално, а предње стопало хоризонтално (на хоризонталном подупирачу) површина). Када је стопало под оптерећењем, торзија између задњег стопала и предњег дела стопе се при опуштању умањује (стопало постаје платформа која се може моделирати) и наглашава се при укрућивању (стопало постаје полуга). Лучни распоред је заправо очигледан, израз степена намотаја завојнице. Стопало стога нема значење правог, али привидног лука или свода, који се подиже током намотавања и спушта током одмотавања спирале. Намотај спирале, са последичним наглашавањем привидног лучног распореда, одговара њеном укрућивању.Одмотавање спирале, уз последично слабљење привидног лука, представља опуштање.
Торзија завојнице хекла повезана је са спољном ротацијом супраподалних сегмената (нога и бутна кост) .Талус, ротирајући се према споља интегрално са костима ногу, издиже се на калканеус затварајући тако средњи тарзални зглоб; задња нога постаје вертикална. Предње стопало чврсто се приања уз тло и реагира на торзијске силе које дјелују на стражње стопало; стога је стопало укочено.
Талус је кост са којом се ниједан мишић не односи директно (нема уметање мишића), креће се као последица сила које преносе суседне кости. Ротације на сагиталној равни (флексија-екстензија) и представља кост ноге пошто је солидаризована са тибијом и фибулом, помоћу бималлеоларних клешта, у ротацијама супраподалних сегмената на попречној равни (интра-екстерна ротација).
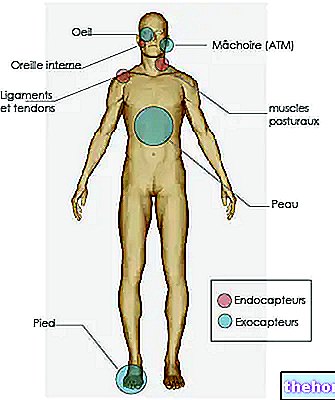
Људско тело је а нестабилни систем равнотеже; висина тежишта (идеално испред од трећег лумбалног пршљена) у односу на уску основу и структура састављена од низа зглобних сегмената су фактори нестабилности. Само будна контрола (постурални тонички систем) може успети у овај услов, да се тражи стабилна динамичка равнотежа у усправном положају и нестабилна динамичка равнотежа током кретања (што омогућава трансформацију потенцијалне енергије у кинетичку енергију). То се дешава пре свега захваљујући информационој служби (екстероцептори за кожу и проприоцептори) која је тако прецизна и правовремена да дозвољава врло валидне одговоре са енергетски економичним интервенцијама (које се не могу открити електромиографски) од стране мишића са распрострањеношћу црвених влакана. Ово је најважнији информативни догађај јер човјеку даје привилегију прилагођавања најразличитијим условима околине.
Човеков биподални ход је условљен подизањем тежишта и танкоћом основе ослонца, у поређењу са четвороножним кретањем. То је сложен чин који произилази из интеракција између унутрашњих и спољашњих сила усмерених вредним системом држања и контрола тела. "равнотежа, која регулише тренутак по тренутак, преко мишића, односе између сила. Већина мишићних група доњих удова активна је током ходања (доњи уд има 29 степени слободе кретања, што одговара 48 мишића ).
Људско кретање је комбинација ритмичког погона према напред и уздизања тела изнад. Тежиште тела при ходању има синусоидни тренд на сагиталној равни који достиже најнижу тачку у двоструком ослонцу (биподално) и максималну висину у моноподалном ослонцу, са екскурзијом од 4-5 цм. Са строго механичке тачке гледишта, напредовање тела у свемиру резултат је комбинације заједничких ротација. Баш као што кружни покрети точкова резултирају кретањем возила напред, ротациони покрети (делимични кругови) удова или њихових делова резултирају кретањем целог тела напред. Захваљујући високом положају тежишта тела, убрзање нашег тела је у основи гравитационе генезе (потенцијална енергија која се претвара у кинетичку енергију). Само у скромној мери долази до убрзања мишићних контракција и то је разлог за чињеницу да „човек може ићи својим путем веома дуго. Заправо, може се рећи да је при ходању мишићни рад потребан само у периодичном успону тежишта.
Циклус ходања укључен је између два калканална ослонца истог стопала и састоји се од носиве фазе и осцилирајуће фазе.
Носива фаза
- Потпора за пету (пријем)
Када пета дође у додир са потпорном површином (пријем), спирала се ослобађа како би омогућила опуштеност стопала да ублажи тежину тела и да се прилагоди самој површини. У ту сврху, доњи уд се ротира изнутра, астрагалус, интегрални део њега, стога се такође ротира изнутра (супинирајући), калканеус је склон, ротирајући се споља. Претпоставка тежине стопалом је постепена и највећа је када гравитациона линија падне у средиште површине затварача. - Потпуна подршка (контакт)
Када је цела табанаста површина у додиру са површином, унутрашња ротација екстремитета се нагло трансформише у спољну ротацију.То покреће механизам који има субталарни зглоб као седиште. Након ротације екстремитета, талус се ротира на попречној равни споља (у просеку за око 12 °) пронађући се и уздижући се изнад калканеуса (даље од калканеус-скафоидно-плантарног лигамента). Заузврат, калканеус се ротира изнутра, супинирајући око „компромисне осе“ („тренутна“ оса око које се одвија процес пронације-супинације а: задње ноге постају вертикалне кроз узајамно завртње талус-калканеал.
Кубасти облик, упорно повезан с калканеусом, плантарно мигрира претпостављајући "на својим раменима" низ клинастих облика.
Предње стопало је постављено у ротационом контрасту са стражњим стопалом за реакцију на тло. На овај начин долази до "омотавања пропелера у задњици и посљедичног" лука "стопала: средњи тарзални зглоб је блокиран и постоји истовремени пролаз тежине на ИВ и В метатарсусу за увртање предњег дела стопала још није круто.
Перонеални мишић (дугачак перонеални) привлачи главу прве метатарзалне кости у додир са земљом, изводећи стабилизацијски рад тако да се тежина сада распоређује на све метатарзалне главе (метатарзални вентилатор); стопало се од елисе претвара у круту "полугу полуге". - Дигитална подршка (погон)
Пета се подиже са земље. Прсти се, након што су се упорно прилагодили површини ослонца, савијају леђно. Ово узрокује скраћивање плантарне апонеурозе, напетост за цца. 1 цм (дигитализације плантарне апонеурозе допиру до одговарајућих базалних фаланги, повезујући се са периостеумом, у сегментима уз зглобове) покрећући механизам витла који употпуњује интраподалну кохезију.
Тежиште тела мигрира вентрално и тело почиње да пада напред. Интервенција контроле мишића, посебно мишића суралног трицепса, коју чине гастрокнемиус и солеус (поред предњих тибијалних, задњих тибијалних, лонгус перонеусних и леђних савијача) и правовремени контралатерални контакт, дјелују кочно.
У погонској фази силе које делују на стопало једнаке су 3-4 пута тежини тела. У ситуацији правилне физиологије, стопало се понаша попут спирале на такав начин да пројекција на тлу тежишта тела остаје углавном центрирана, односно пролази дуж сопствене осе, што одговара „приближно“осовина затварача, оса која пролази централно до задње ноге и у средини између другог и трећег прста.

Осцилирајућа фаза
Осцилирајућа фаза представља провиденцијалну припрему за носиву фазу. Унутрашња ротација удова, око механичке осе, која почиње у овој фази, неопходна је претпоставка за накнадну спољну ротацију. Захваљујући овој наизменичној ротацији, потенцијална енергија се у људском телу претвара у кинетичку енергију. Фазе осциловања и ношења су стога повезане са континуитетом прогресије. Клатно клатно је заправо носиво клатно. Неуро-мишићни комплекс надгледа ову реципрочну примопредају стабилизујући је, модулирајући и карактеришући као типичан израз индивидуалности.
По рођењу, нервни кругови предиспонирани за ходање већ су присутни, међутим, како би се омогућио адекватан и неопходан развој мишићно -коштаног система, они су привремено инхибирани вишим центрима. Држање као вољни чин тако постаје феномен сазријевања и учења. Приближно годину дана , прво научено, а затим почиње аутоматизовано ходање. Тек око две године старости, након развоја релативних структура, аутоматска контрола је ефикасна.
Стога је савремена биомеханика у попречној равни идентификовала приоритетни просторни елемент у статици и динамици човека.Заправо, управо од ротације у попречној равни активира се механизам антигравитације, који омогућава тежишту да мигрирати према горе ... Висина тежишта оптерећује систем потенцијалном енергијом или нестабилношћу која се, међутим, као што сам рекао, у динамици претвара у неопходну кинетичку енергију, омогућавајући тако напредовање у простору уз скромну потрошњу мишићне енергије.
Зглобови у којима се кретање одвија у попречној равни су, са затвореним кинетичким ланцем, коксофеморални и субталарни. Конкретно, коксофеморални зглоб и талус-скафоидни зглоб су аналогно структурирани и одговарајуће распоређени. Основни покрети у антигравитационој механици кука су продужење и истовремена спољна ротација. Приликом преласка са флексије на екстензију, бутна кост се тада ротира према споља, одражавајући се у механизму за укрућивање отпуштања затварача. Ово је дакле анатомско-функционално стање које погодује нашој антигравитацији.
Анализа морфолошких и функционалних карактеристика доњег екстремитета у односу на попречну раван отвара велико поглавље структурне патологије које разматра аномалије ротације фемора и тибије и реперкусије на функцију задњице и обрнуто. На овај начин се баца робустан мост који све више повезује стопало са надређеним сегментима тела, посебно са карличним појасом, са лопатицом-хумералним појасом, са цервико-окципиталном шарком до темпоромандибуларног зглоба, у контексту биомеханике и пато-механичке.
Остали чланци на тему „Држање и здравље - важност„ плантарне подршке “
- Држање и велнес - стопало и држање
- Држање
- Држање и благостање - Нетачна Подалиц подршка
- Држање и благостање - функционална сколиоза
- Држање и благостање - органске дисфункције постуралног порекла
- Држање и благостање-Постурални преглед и преваспитавање
- Држање и благостање